
皆さん こんにちは。
ポンコツRustacean の moon です。
今回はUARTの送信処理を使ってprintln!マクロを実装してみました。
この記事は開発環境を構築することを前提にしています。
環境構築について知りたい方は こちらの記事 をご覧になってください。
println!マクロは以下のサイトを参考にさせて頂きました。
また、このサイトは 書籍 基礎から学ぶ組込みRust を参考にしています。
サイトに書かれている通りで、UARTの送信部分の初期設定と送信処理を追加することでprintln!マクロが実装できました。
println!マクロ
当たり前のように使われているprintln!マクロですが、組み込みRustで使うには一工夫が必要になります。
ここでは上記のサイトを参考にしてUARTの送信機能を使ってprintln!マクロを実現しました。
パッケージの複製を作成する
まず私のGitHubリポジトリにあるRustのひな形をベースに別名でパッケージをつくります。
ひな形はデバッグ環境用のものですから、その複製もデバッグできるようになります。
新しいパッケージ名を rp2040-uart-println として git clone します。
xxxxは皆さんのユーザー名です。
カレントディレクトリを rp2040-uart-println に移し、VSCodeを起動します。
C:\Users\xxxx>cd pprp
C:\Users\xxxx\pprp>git clone https://github.com/moons3925/rp2040.git rp2040-uart-println
C:\Users\xxxx\pprp>cd rp2040-uart-println
C:\Users\xxxx\pprp\rp2040-uart-println>code .
Cargo.tomlを編集する
[dependencies]を以下の通りに編集します。
[dependencies]
cortex-m = "0.7"
cortex-m-rt = "0.7"
embedded-hal = "0.2.7"
rp2040-hal = "0.10.0"
defmt = "0.3"
defmt-rtt = "0.4"
rp-pico = "0.9"
fugit = "0.3.7"
panic-halt = "0.2.0"
critical-section = "1.1.2"
nb = "1.0.0"
それから [package] の name を以下の通りにします。
name = "rp2040-uart-println"
launch.jsonを編集する
.vscode にある launch.json を編集します。
executable: の名称を rp2040 から rp2040-uart-println に変更します。
"executable": "./target/thumbv6m-none-eabi/debug/rp2040-uart-println",
main.rsを編集する
main.rsを以下の通りに編集します。
リングバッファのサンプルを改造したので、今回受信側は使っていませんがコードは残しています。
そのため使っていない部分の警告が出ますが問題はありません。
表示に時間がかかるので BUFF_SIZE = 32 に変更しました。
#![no_std]
#![no_main]
use embedded_hal::digital::v2::OutputPin;
use embedded_hal::serial::{Read, Write as OtherWrite};
use fugit::RateExtU32;
use hal::gpio::bank0::{Gpio0, Gpio1};
use hal::pac;
use hal::pac::interrupt;
use hal::uart::{DataBits, StopBits, UartConfig};
use panic_halt as _;
use rp2040_hal as hal;
use rp2040_hal::Clock;
use rp_pico::entry;
type UartPins = (
hal::gpio::Pin<Gpio0, hal::gpio::FunctionUart, hal::gpio::PullNone>,
hal::gpio::Pin<Gpio1, hal::gpio::FunctionUart, hal::gpio::PullNone>,
);
const BUFF_SIZE: usize = 64;
#[derive(Debug)]
struct RingBuffer {
buffer: [u8; BUFF_SIZE],
read_ptr: usize,
write_ptr: usize,
}
impl RingBuffer {
fn read(&mut self) -> u8 {
let mut byte = 0;
critical_section::with(|_| {
byte = self.buffer[self.read_ptr];
self.read_ptr = (self.read_ptr + 1) & (BUFF_SIZE - 1);
});
byte
}
fn write(&mut self, c: u8) {
self.buffer[self.write_ptr] = c;
self.write_ptr = (self.write_ptr + 1) & (BUFF_SIZE - 1);
}
fn readable(&mut self) -> bool {
let mut b = false;
critical_section::with(|_| {
if self.read_ptr == self.write_ptr {
b = false;
} else {
b = true;
}
});
b
}
fn writable(&mut self) -> bool {
if (self.write_ptr + 1) & (BUFF_SIZE - 1) == self.read_ptr {
return false;
} else {
return true;
}
}
}
static mut RING: RingBuffer = RingBuffer {
buffer: [0; BUFF_SIZE],
read_ptr: 0,
write_ptr: 0,
};
static mut UART_RECEIVER: Option<hal::uart::Reader<pac::UART0, UartPins>> = None;
static mut UART_TRANSMITTER: Option<hal::uart::Writer<pac::UART0, UartPins>> = None;
use core::fmt::{self, Write};
#[macro_export]
macro_rules! print {
($($arg:tt)*) => ($crate::_print(format_args!($($arg)*)));
}
#[macro_export]
macro_rules! println {
($fmt:expr) => (print!(concat!($fmt, "\n")));
($fmt:expr, $($arg:tt)*) => (print!(concat!($fmt, "\n"), $($arg)*));
}
pub fn _print(args: fmt::Arguments) {
let mut writer = UartWriter {};
writer.write_fmt(args).unwrap();
}
struct UartWriter;
impl core::fmt::Write for UartWriter {
fn write_str(&mut self, s: &str) -> fmt::Result {
for c in s.bytes() {
write_byte(c);
}
Ok(())
}
}
fn write_byte(c: u8) {
unsafe {
if let Some(ref mut writer) = UART_TRANSMITTER.as_mut() {
let _ = nb::block!(writer.write(c));
}
}
}
#[entry]
fn main() -> ! {
let mut pac = pac::Peripherals::take().unwrap();
let core = pac::CorePeripherals::take().unwrap();
let mut watchdog = hal::Watchdog::new(pac.WATCHDOG);
let clocks = hal::clocks::init_clocks_and_plls(
rp_pico::XOSC_CRYSTAL_FREQ,
pac.XOSC,
pac.CLOCKS,
pac.PLL_SYS,
pac.PLL_USB,
&mut pac.RESETS,
&mut watchdog,
)
.ok()
.unwrap();
let mut delay = cortex_m::delay::Delay::new(core.SYST, clocks.system_clock.freq().to_Hz());
let sio = hal::Sio::new(pac.SIO);
let pins = rp_pico::Pins::new(
pac.IO_BANK0,
pac.PADS_BANK0,
sio.gpio_bank0,
&mut pac.RESETS,
);
let uart_pins = (
// UART TX (characters sent from RP2040) on pin 1 (GPIO0)
pins.gpio0.reconfigure(),
// UART RX (characters received by RP2040) on pin 2 (GPIO1)
pins.gpio1.reconfigure(),
);
let uart = hal::uart::UartPeripheral::new(pac.UART0, uart_pins, &mut pac.RESETS)
.enable(
UartConfig::new(9600.Hz(), DataBits::Eight, None, StopBits::One),
clocks.peripheral_clock.freq(),
)
.unwrap();
let (mut uart_rx, uart_tx) = uart.split();
unsafe {
pac::NVIC::unmask(hal::pac::Interrupt::UART0_IRQ);
}
uart_rx.enable_rx_interrupt();
critical_section::with(|_| unsafe {
UART_RECEIVER = Some(uart_rx);
UART_TRANSMITTER = Some(uart_tx);
});
let mut led_pin = pins.led.into_push_pull_output();
unsafe {
for i in 0..BUFF_SIZE {
RING.buffer[i] = i as u8;
}
println!("{:?}", RING);
println!("{:#?}", RING);
}
let s = "Rust";
let mut n = 0;
loop {
println!("Hello Embedded {}!, count = {}", s, n);
n += 1;
led_pin.set_high().unwrap();
delay.delay_ms(500);
led_pin.set_low().unwrap();
delay.delay_ms(500);
}
}
#[interrupt]
fn UART0_IRQ() {
unsafe {
if let Some(ref mut uart_recv) = UART_RECEIVER.as_mut() {
if let Ok(c) = uart_recv.read() {
if RING.writable() {
RING.write(c);
}
}
}
}
}
PC側の準備
通信の確認用として Tera Term を使います。
インストール後、 Tera Term を起動し、シリアルポートでUSBシリアル変換モジュールのCOMポートを選択します。
もしCOMポートが複数ある場合には、USBシリアル変換モジュールのケーブルをはずしてデバイスマネージャーでCOMポート番号を確認しておきます。

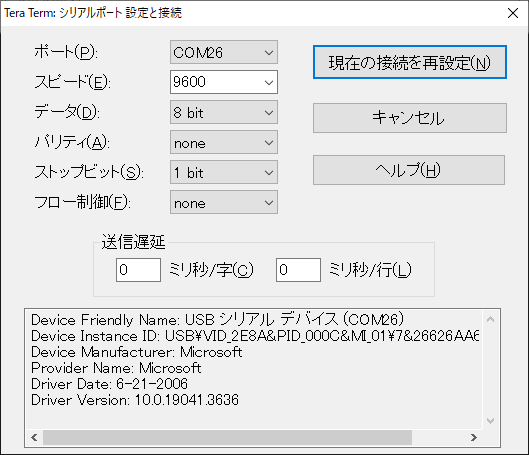
起動後、設定メニューのシリアルポートから以下の設定を行います。
スピート : 9600
データ : 8 bit
パリティ : なし
ストップビット : 1
フロー制御 : none
これらの値は送受信する相手と合わせておく必要があります。
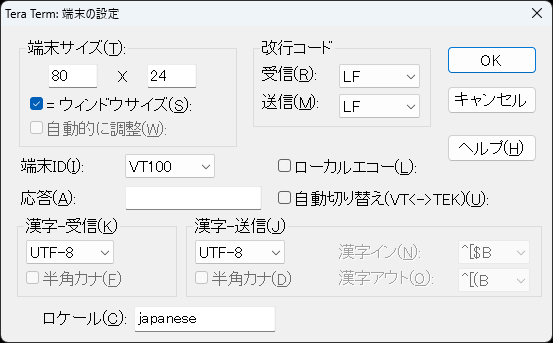
改行コードを設定する
設定 – 端末 で改行コードを LF に設定します。
ビルドして実行する
Run – Start Debugging (F5) からプログラムを実行します。
Tera Termで以下のように表示されれば成功です。

データ量が多いと表示に時間がかかるために排他制御は考慮していません。
その点はご注意ください。
GitHubにアップ
GitHubの rp2040-uart-println にプロジェクトをアップしましたので参考になさってください。
お疲れさまでした。

