今回は cortex-m の Delay を使ってみます。
ネット上で stm32 と delay のキーワードで検索をかけると、HAL を使った Delay の記事が多く見つかりました。
cortex-Mって SysTick があるからHALを使わずにやる方法ないかな?と思って探してみたら、ありましたねぇ。
というわけで今回もHALは使わずにベアメタルでいってみましょう。
開発環境は以下の通りです。
PC:Windows10 OS
Board:STM32Nucleo-F401RE
デバイス:STM32F401RE
エディタ:VSCode
言語:Rust
ボードの情報は こちら からご覧いただけます。
環境構築については こちら をご覧になってください。
クロックについて
前回の記事で SYSCLK = 84MHz に設定する方法を書きました。
速いに越したことはないので、今回も84MHzを使います。
Delay構造体
cortex-m クレート の version=”0.7.4″ (こちら)を見ると Module に delay が追加されています。
0.6 のバージョンにはありませんでした。
使い方は こちら をご覧になってください。
今回は new() と delay_ms() メソッドを使います。
プロジェクトをつくる
コマンドプロンプトを起動し、cargo generate と git を使ってSTM32F401用のプロジェクトを作成します。
cargo generate –git https://github.com/rust-embedded/cortex-m-quickstart.git と入力しプロジェクト名を聞いてくるので stm32f401-delay と入力します。
cargo generate --git https://github.com/rust-embedded/cortex-m-quickstart.git
Unable to load config file: C:\Users\xxxxx\.cargo\cargo-general.toml
Project Name : stm32f401-delay
C:\Users\xxxxx\stm32f401-delay というフォルダができていることを確認します。
xxxxx は皆さまのユーザー名です。
VSCodeを起動する
以下のようにコマンドを入力することで、stm32f401-delayをカレントディレクトリとしてエディタ(VSCode)が起動します。
cd stm32f401-delay
code .
C:\Users\xxxxx>cd stm32f401-delay
C:\Users\xxxxx\stm32f401-delay>code .
config.tomlの編集
gdbの指定と Cortex-M4F をターゲットに指定します。
ツリーの >.cargo の >部分をクリックすると V .cargo となり、そのツリー下に config.toml というファイルが見えるのでこれをクリックして開きます。
(1)こちらの環境では 8行目に # runner = “arm-none-eabi-gdb -q -x openocd.gdb” があるので、先頭の # をはずします。
(2)こちらの環境では35行目に target = “thumbv7m-none-eabi” # Cortex-M3 があるので、先頭に # をつけます。
前後の行に合わせて # target = … のように記述しておきます。
(3)こちらの環境では37行目に # target = “thumbv7me-none-eabihf” # Cortex-M4F and Cortex-M7F (with FPU) があるので、先頭の # をはずします。
# のある行はコメント(無効)になります。
編集が終わったら Ctrl + s で保存しておきます。
launch.jsonの編集
ここではデバイスの指定を行います。
ツリーの >.vscode の >部分をクリックすると V .vscode となり、そのツリー下に launch.json というファイルが見えるのでこれをクリックして開きます。
“configurations”: の中に {},{} で2つの項目が区切られています。
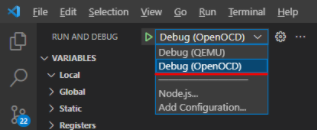
上の方は “name” が “Debug (QEMU)” となっていて、下の “name” が “Debug (OpenOCD)” です。
QEMUはエミュレーターで、今回は OpenOCD による Debug を行いますので、下の {} 内だけを編集します。
(1)こちらの環境では35行目に #device”: “STM32F303VCT6” とあるので “STM32F401RET6” に変更します。
(2)こちらの環境では38行目に “target/stm32f3x.cfg” とあるので “target/stm32f4x.cfg” に変更します。
(3)こちらの環境では40行目に “svdFile”: “${workspaceRoot}/.vscode/STM32F303.svd” とあるので最後の 303 を 401 に変更します。
編集が終わったら Ctrl + s で保存しておきます。
Cargo.tomlの編集
ツリーの下の方に Cargo.toml があります。
今回はhalを使わずに stm32f4 というクレートを使いますので、それを指定しておきます。
クレートとはライブラリのようなものです。
23~25行を以下のように編集します。
dependencies は依存関係の意味で、こういうクレートの、このバージョンのものを使いますよ とRustに教えてあげます。
今回は HAL を使わないので stm32f4クレートを指定します。
[dependencies.stm32f4]
features = ["stm32f401", "rt"]
version = "0.14"
(注意)今回の追加
8行目に cortex-m = “0.6.0” があるので Delayを使うために “0.7” にバージョンを上げておきます。
編集が終わったら Ctrl + s で保存しておきます。
memory.xの編集
ツリーの下の方に memory.x があります。
デバイスによってFlashメモリーとRAMの容量が異なるので、ここで指定します。
6, 7行目を以下のように編集します。
FLASH : ORIGIN = 0x08000000, LENGTH = 512K
RAM : ORIGIN = 0x20000000, LENGTH = 96K
編集が終わったら Ctrl + s で保存しておきます。
svdファイル
svdファイルはデバッグに必要なファイルです。
svdファイルは こちら からダウンロードできます。
解凍して、data\STMicroの中にある STM32F401.svd を C:\Users\xxxxx\stm32f401-delay\.vscode に保存します。
ソースコード
main()関数の外側は、組み込み特有の記述になります。
このように書くものだと考えておけば良いと思います。
#![no_std]
#![no_main]
use panic_halt as _; // you can put a breakpoint on `rust_begin_unwind` to catch panics
use cortex_m_rt::entry;
use cortex_m::delay; // (1)Delayを使う
use stm32f4::stm32f401;
#[entry]
fn main() -> ! {
let dp = stm32f401::Peripherals::take().unwrap();
let cp = cortex_m::peripheral::Peripherals::take().unwrap();
clock_init(&dp); // (2)クロック関連の初期化
gpioa5_init(&dp); // (3)GPIOA5の初期化
let mut delay = delay::Delay::new(cp.SYST, 84000000_u32); // (4)Delayの初期化
loop {
dp.GPIOA.odr.modify(|r, w| w.odr5().bit(r.odr5().is_low())); // (5)GPIOAの出力を反転する
delay.delay_ms(1000_u32); // (6)1000msec遅延
}
}
fn clock_init(dp: &stm32f401::Peripherals) {
// PLLSRC = HSI: 16MHz (default)
dp.RCC.pllcfgr.modify(|_, w| w.pllp().div4()); // P=4
dp.RCC.pllcfgr.modify(|_, w| unsafe { w.plln().bits(336) }); // N=336
// PLLM = 16 (default)
dp.RCC.cfgr.modify(|_, w| w.ppre1().div2()); // APB1 PSC = 1/2
dp.RCC.cr.modify(|_, w| w.pllon().on()); // PLL On
while dp.RCC.cr.read().pllrdy().is_not_ready() { // 安定するまで待つ
// PLLがロックするまで待つ (PLLRDY)
}
// データシートのテーブル15より
dp.FLASH.acr.modify(|_,w| w.latency().bits(2)); // レイテンシの設定: 2ウェイト
dp.RCC.cfgr.modify(|_,w| w.sw().pll()); // sysclk = PLL
while !dp.RCC.cfgr.read().sws().is_pll() { // SWS システムクロックソースがPLLになるまで待つ
}
}
fn gpioa5_init(dp: &stm32f401::Peripherals) {
dp.RCC.ahb1enr.modify(|_, w| w.gpioaen().enabled()); // GPIOAのクロックを有効にする
dp.GPIOA.moder.modify(|_, w| w.moder5().output()); // GPIOA5を汎用出力に設定
}
コード概要
(2), (3)は前回つくったコードを機能別で関数にまとめました。
(4)Delay構造体の生成。
cortex-mクレートの Delay::new()では第2引数に AHB Clock を指定します。
今回はSYSCLKそのまま(AHBプリスケーラ=1/1)なので、84MHzを指定しています。
(5)GPIOAの出力値を読んで反転出力します。
(6)Delayを使って1秒遅延させています。
動作させてみる
それでは F5キーでプログラムを起動した後、entry で停止したらもう一度F5キーを押してプログラムを動作させてみます。
1秒周期でLD2(緑)が点滅すれば成功です。
デバッグモードは OpenOCD に設定する必要があるので、エラーが出る場合には確認してみてください。
いかがでしたか?
皆さんの環境では、うまく動作しましたか?
今回のプロジェクトを stm32f401-delay におきましたので、よろしければ参考になさってください。
お疲れさまでした。