今回はDWTを使ってみます。
今回もベアメタルと言われているレジスタにアクセスする方法を使います。
開発環境は以下の通りです。
PC:Windows10 OS
Board:STM32Nucleo-F401RE
デバイス:STM32F401RE
エディタ:VSCode
言語:Rust
ボードの情報は こちら からご覧いただけます。
環境構築については こちら をご覧になってください。
DWTとは
データ・ウォッチポイント アンド トレース ユニットの略です。
その一部の機能としてシステムクロックを使った時間計測がありますので、今回はそれを使ってみます。
プロジェクトをつくる
コマンドプロンプトを起動し、cargo generate と git を使ってSTM32F401用のプロジェクトを作成します。
cargo generate –git https://github.com/rust-embedded/cortex-m-quickstart.git と入力しプロジェクト名を聞いてくるので stm32f401-dwt と入力します。
cargo generate --git https://github.com/rust-embedded/cortex-m-quickstart.git
Unable to load config file: C:\Users\xxxxx\.cargo\cargo-general.toml
Project Name : stm32f401-dwt
C:\Users\xxxxx\stm32f401-dwt というフォルダができていることを確認します。
xxxxx は皆さまのユーザー名です。
VSCodeを起動する
以下のようにコマンドを入力することで、stm32f401-dwtをカレントディレクトリとしてエディタ(VSCode)が起動します。
cd stm32f401-dwt
code .
C:\Users\xxxxx>cd stm32f401-dwt
C:\Users\xxxxx\stm32f401-dwt>code .
config.tomlの編集
gdbの指定と Cortex-M4F をターゲットに指定します。
ツリーの >.cargo の >部分をクリックすると V .cargo となり、そのツリー下に config.toml というファイルが見えるのでこれをクリックして開きます。
(1)こちらの環境では 8行目に # runner = “arm-none-eabi-gdb -q -x openocd.gdb” があるので、先頭の # をはずします。
(2)こちらの環境では35行目に target = “thumbv7m-none-eabi” # Cortex-M3 があるので、先頭に # をつけます。
前後の行に合わせて # target = … のように記述しておきます。
(3)こちらの環境では37行目に # target = “thumbv7me-none-eabihf” # Cortex-M4F and Cortex-M7F (with FPU) があるので、先頭の # をはずします。
# のある行はコメント(無効)になります。
編集が終わったら Ctrl + s で保存しておきます。
launch.jsonの編集
ここではデバイスの指定を行います。
ツリーの >.vscode の >部分をクリックすると V .vscode となり、そのツリー下に launch.json というファイルが見えるのでこれをクリックして開きます。
“configurations”: の中に {},{} で2つの項目が区切られています。
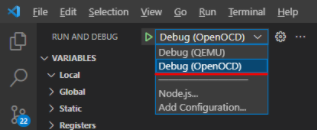
上の方は “name” が “Debug (QEMU)” となっていて、下の “name” が “Debug (OpenOCD)” です。
QEMUはエミュレーターで、今回は OpenOCD による Debug を行いますので、下の {} 内だけを編集します。
(1)こちらの環境では35行目に #device”: “STM32F303VCT6” とあるので “STM32F401RET6” に変更します。
(2)こちらの環境では38行目に “target/stm32f3x.cfg” とあるので “target/stm32f4x.cfg” に変更します。
(3)こちらの環境では40行目に “svdFile”: “${workspaceRoot}/.vscode/STM32F303.svd” とあるので最後の 303 を 401 に変更します。
編集が終わったら Ctrl + s で保存しておきます。
Cargo.tomlの編集
ツリーの下の方に Cargo.toml があります。
今回はhalを使わずに stm32f4 というクレートを使いますので、それを指定しておきます。
クレートとはライブラリのようなものです。
23~25行を以下のように編集します。
dependencies は依存関係の意味で、こういうクレートの、このバージョンのものを使いますよ とRustに教えてあげます。
今回は HAL を使わないので stm32f4クレートを指定します。
[dependencies.stm32f4]
features = ["stm32f401", "rt"]
version = "0.14"
編集が終わったら Ctrl + s で保存しておきます。
クレートは cretes.io から探すことができます。
memory.xの編集
ツリーの下の方に memory.x があります。
デバイスによってFlashメモリーとRAMの容量が異なるので、ここで指定します。
6, 7行目を以下のように編集します。
FLASH : ORIGIN = 0x08000000, LENGTH = 512K
RAM : ORIGIN = 0x20000000, LENGTH = 96K
編集が終わったら Ctrl + s で保存しておきます。
svdファイル
svdファイルはデバッグに必要なファイルです。
svdファイルは こちら からダウンロードできます。
解凍して、data\STMicroの中にある STM32F401.svd を C:\Users\xxxxx\stm32f401-dwt\.vscode に保存します。
ソースコード
main()関数の外側は、組み込み特有の記述になります。
このように書くものだと考えておけば良いと思います。
#![no_std]
#![no_main]
use panic_halt as _; // you can put a breakpoint on `rust_begin_unwind` to catch panics
use cortex_m_rt::entry;
use cortex_m::delay;
use stm32f4::stm32f401;
#[entry]
fn main() -> ! {
let dp = stm32f401::Peripherals::take().unwrap();
let mut cp = cortex_m::peripheral::Peripherals::take().unwrap();
// PLLSRC = HSI (default)
dp.RCC.pllcfgr.modify(|_, w| w.pllp().div4()); // P=4
dp.RCC.pllcfgr.modify(|_, w| unsafe { w.plln().bits(336) }); // N=336
// PLLM = 16 (default)
dp.RCC.cfgr.modify(|_, w| w.ppre1().div2()); // APB1 PSC = 1/2
dp.RCC.cr.modify(|_, w| w.pllon().on()); // PLL On
while dp.RCC.cr.read().pllrdy().is_not_ready() { // 安定するまで待つ
// PLLがロックするまで待つ (PLLRDY)
}
// データシートのテーブル15より
dp.FLASH.acr.modify(|_,w| w.latency().bits(2)); // レイテンシの設定: 2ウェイト (3.3V, 84MHz)
dp.RCC.cfgr.modify(|_,w| w.sw().pll()); // sysclk = PLL
while !dp.RCC.cfgr.read().sws().is_pll() { // SWS システムクロックソースがPLLになるまで待つ
}
// SYSCLK = 16M * 1/M * N * 1/P = 84MHz (= AHB Clock)
let mut delay = delay::Delay::new(cp.SYST, 84000000_u32);
cp.DWT.enable_cycle_counter(); // (1)
let mut msecond: u32 = 1000;
loop {
cp.DWT.set_cycle_count(0_u32); // (2)
delay.delay_ms(msecond); // (3)
usecond = get_usec(); // (4)
msecond = get_msec(); // (5)
}
}
fn get_msec() -> u32 {
stm32f401::DWT::cycle_count() / 84000_u32
}
fn get_usec() -> u32 {
stm32f401::DWT::cycle_count() / 84_u32
}
コード概要
上の方は前回までと同じ設定で、HSI を使って 84MHz のクロックをつくっています。
(1)DWTを有効にする
(2)DWTのカウンターにゼロをセットする
(3)Delayを使って1000msec遅延される
(4) (3)の処理時間に対してusecの値を取得します。
(5) (3)と(4)の処理時間に対してmsecの値を取得します。
msecondの期待値は1000です。
処理時間を知りたいときの目安として使うことができそうです。
動作させてみる
それでは F5キーでプログラムを起動した後、entry で停止したらもう一度F5キーを押してプログラムを動作させてみます。
少し動かした後、プログラムを停止してmsecondeの値を確認してみてください。
デバッグモードは OpenOCD に設定する必要があるので、エラーが出る場合には確認してみてください。
msecond の値が 1000 になれば成功です。
いかがでしたか?
皆さんの環境では、うまく動作しましたか?
今回のプロジェクトを stm32f401-dwt におきましたので、よろしければ参考になさってください。
お疲れさまでした。